
Profesor Tadeusz Kubiczek (1902–1988) stypendysta Fundacji Kościuszkowskiej
- Szczegóły
- Kategoria: numer 10
- 23 styczeń 2014
W 2012 roku, roku 60-lecia Wydziału Inżynierii Mechanicznej i Robotyki w Akademii Górniczo-Hutniczej im. Stanisława Staszica w Krakowie, przypada 110. rocznica urodzin, 50. rocznica objęcia kierownictwa katedry i 40. rocznica przejścia na emeryturę prof. Tadeusza Kubiczka. W 1962 roku po śmierci prof. Wacława Lesieckiego, pierwszego Kierownika Katedry Maszyn i Urządzeń Górniczych został mianowany jego następcą i jednocześnie kierownikiem Zakładu Maszyn do Urabiania. Profesor Tadeusz Kubiczek był praktykantem w kopaniach węgla w USA, a także jako stypendysta Fundacji Kościuszkowskiej odbył studia specjalistyczne z zakresu mechanizacji górnictwa w Graduate School-University w Pittzburghu.
Będąc doktorantem profesora, później pierwszym habilitantem i docentem w kierowanej przez Niego katedrze, przybliżam młodszym, dokonania tego wspaniałego specjalisty praktyka, autora wielu podręczników dla uczniów w technikach górniczych, który w wieku 62 lat obronił na wydziale pracę doktorską, człowieka niezwykle zdyscyplinowanego, o wysokiej i ujmującej kulturze osobistej, zapalonego członka sekcji turystyki motorowej PTTK.
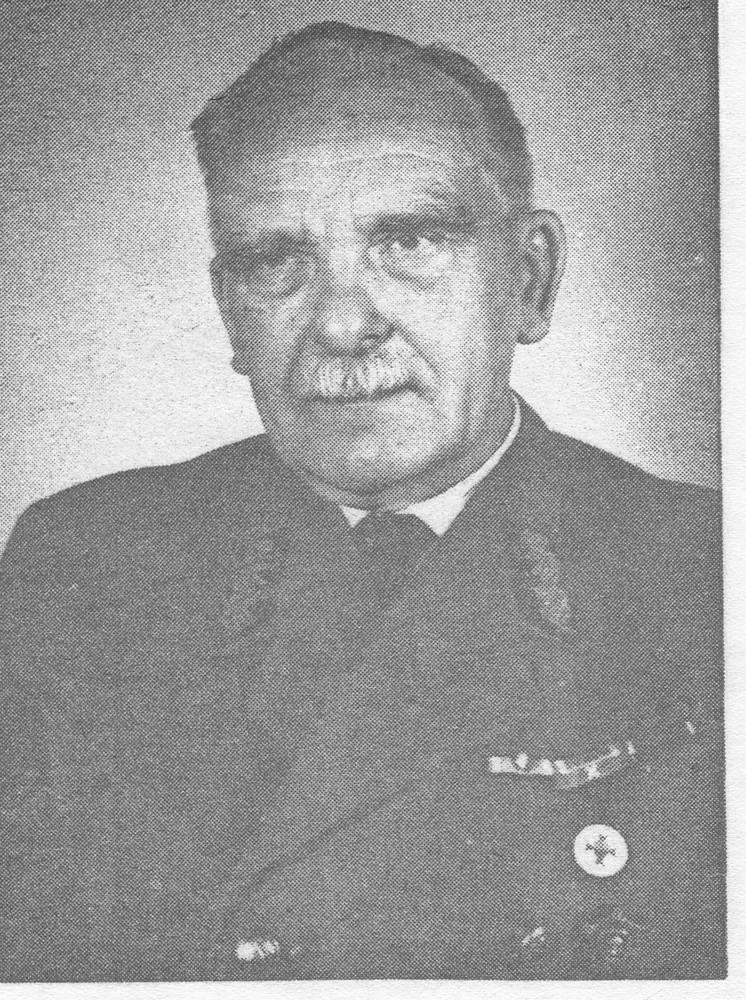
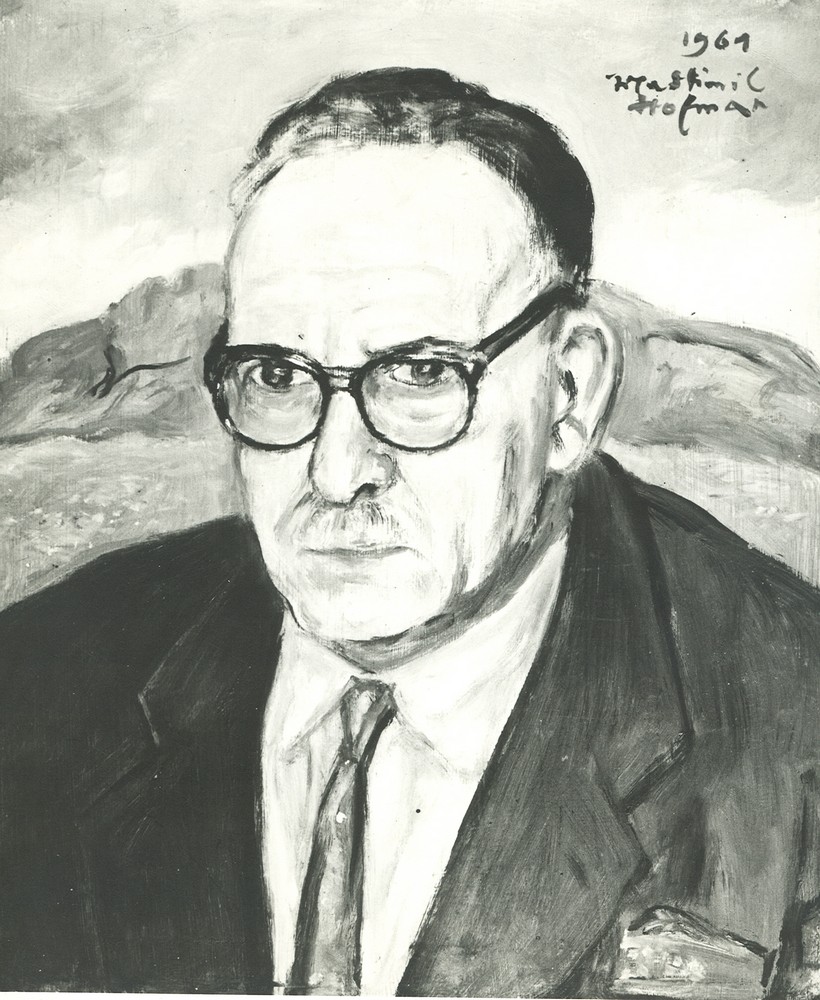
Profesor Tadeusz Kubiczek
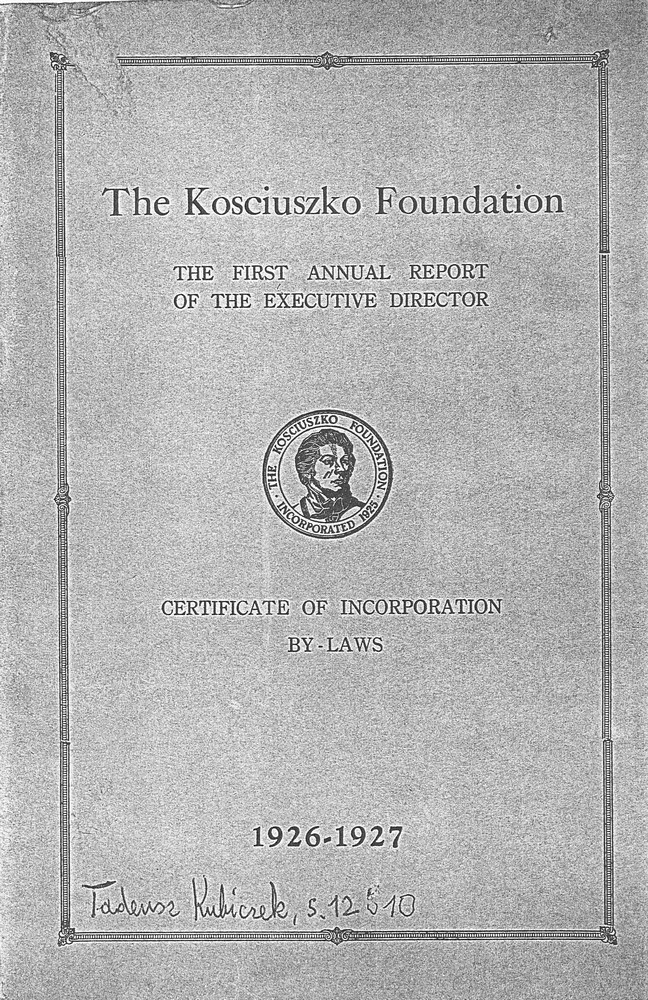
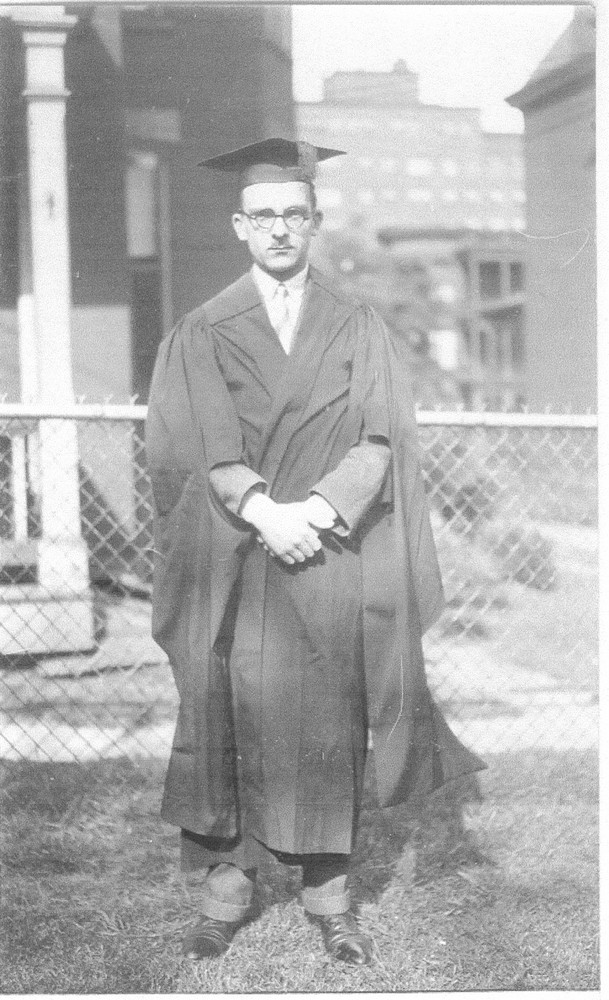
Tadeusz Aleksander Kubiczek, syn Aleksandra, urodził się 9 lipca 1902 roku w Starym Siole koło Lwowa, gdzie jego ojciec pracował jako urzędnik kolejowy. Do szkoły powszechnej i gimnazjum uczęszczał już w Krakowie. Po zdaniu egzaminu dojrzałości z odznaczeniem w VII Gimnazjum Realnym w maju 1920 roku, w lipcu wstąpił ochotniczo do wojska polskiego, służąc w wojskach łączności jako telegrafista. Zwolniony z wojska w grudniu tegoż roku po przejściu nawały bolszewickiej zapisał się na studia na Wydziale Górniczym Akademii Górniczej w Krakowie. Studia ukończył 23 marca 1926 roku obroną pracy dyplomowej (dyplom nr 94) wykonywanej pod kierunkiem prof. Stanisława Skoczylasa uzyskując dyplom inżyniera górniczego z postępem bardzo dobrym. Wcześniej, bo w roku akademickim 1924/25 studiował na Uniwersytecie Jagiellońskim w Krakowie matematykę i fizykę, będąc od stycznia 1924 roku do lipca 1926 roku zatrudnionym na stanowisku asystenta w ówczesnej Katedrze Maszyn Górniczych. Po uzyskaniu stypendium Fundacji Kościuszkowskiej od lipca 1926 do czerwca 1927 roku odbył studia specjalistyczne z zakresu mechanizacji górnictwa w Graduate School – University of Pittsburgh. Jako przedmiot główny obrał górnictwo węglowe, a jako przedmioty dodatkowe maszyny parowe i elektrotechnikę. Po spełnieniu wszystkich uniwersyteckich warunków i zdaniu wszystkich wymaganych egzaminów w dniu 2 czerwca 1927 roku został promowany na stopień „Master of Science”. Po zakończeniu studiów jeszcze przez kilka miesięcy pracował w „Research Department of Pittsburgh Coal Company” oraz w kopalniach węgla, celem zdobycia praktyki zawodowej, aby po powrocie do kraju oddać zdobytą wiedzę na pożytek i rozwój polskiego górnictwa.
Po powrocie w 1927 roku ze Stanów Zjednoczonych nie kontynuował pracy asystenta w Akademii Górniczej, lecz rozpoczął pracę zawodową w górnictwie, początkowo jako technik strzałowy w kopalni węgla „Charlotta” – Rydułtowy, a następnie w latach 1928–1932 w kopalni „Knurów”, gdzie pracował najpierw jako nadsztygar i asystent ruchu, a przez ostatnie dwa lata jako kierownik robót górniczych. W 1932 roku przenosi się do pracy na kopalnię „Prezydent” w Chorzowie, gdzie jako kierownik robót górniczych pracował do września 1939 roku. W swojej pracy zawodowej starał się przekazywać i wprowadzać w czyn swoje wiadomości zdobyte w obranej specjalności na studiach i praktykach w Stanach Zjednoczonych, bowiem w czasie jego pracy w okresie kapitalistycznego górnictwa w Polsce, nie było jeszcze w ogóle mowy o szerszej nowoczesnej mechanizacji poza wierceniem otworów i przewozem, a wrębiarki dopiero wchodziły w użycie. Brał udział w pracach o pionierskim znaczeniu nie tylko dla górnictwa polskiego, ale nawet europejskiego. Do takich pionierskich prac należy zaliczyć wprowadzanie w okresie 1928 roku dużych wozów w kopalni „Knurów”, pierwszych wozów w górnictwie na kontynencie europejskim, a także organizacja przewozu na kopalni „Prezydent”, gdzie po raz pierwszy (poza Stanami Zjednoczonymi) wprowadzono do przewozu w górnictwie rozkładu jazdy po nachyleniach pociągami złożonymi z dużych wozów i ciężkich lokomotyw. Do jego osiągnięć należy również zaliczyć zastosowanie po raz pierwszy w polskim górnictwie węglowym ciężkich wrębiarek do robót przygotowawczych i ich zespołową organizację pracy.
Okupację spędził w Krakowie, pracując początkowo jako pracownik techniczny, a później jako pracownik umysłowy w Fabryce Wyrobów Drzewnych inż. Chmielewski, produkującej baraki.
W lutym 1945 roku powrócił na Śląsk, obejmując stanowisko dyrektora KWK „Polska” w Świętochłowicach. Następnie pracuje w kilku jednostkach związanych z górnictwem, między innymi jako inspektor kopalń i główny inżynier górniczy w Chorzowskim Zjednoczeniu przemysłu Węglowego. Rozpracował szereg projektów dla kopalń ChZPW o zasadniczym znaczeniu dla dalszego ich rozwoju jak przykładowo projekt założenia nowego poziomu 550 m na kopalni „Polska”, wybieranie podbudowanych pokładów na kopalni „Śląsk”, wprowadzenie podsadzki płynnej na kopalni „Barbara-Wyzwolenie” z opracowaniem specjalnego zbiornika na piasek podsadzkowy ze względu na trudne warunki terenowe w miejscu lokowania budowli dla tego urządzenia. Na specjalne wyróżnienie zasługuje projekt przebudowy kopalni „Matylda” i jej modernizacji. Wprowadzenie w życie tych projektów pozwoliło na należytą gospodarkę złożem i podniesienie technicznego i gospodarczego poziomu eksploatacji 9 kopalń, w tym kopalnie „Polska” i „Barbara-Wyzwolenie, a także na znaczne, bo do 25 lat, przedłużenie żywotności kopalń skazanych na zamknięcie z powodu wyczerpywania się zasobów (kopania „Śląsk”, kopalnia „Matylda”). Od 1948 roku współpracuje z Głównym Instytutem Górnictwa, wygłaszając wiele referatów i bierze udział jako wykładowca na kursach dla wyższego dozoru górniczego. Z pracownikami GIG współpracował w dziedzinie czysto naukowej od 1949 roku, kiedy to z ramienia przemysłu węglowego wyjeżdżał kilkakrotnie do Belgii na okresy 6-tygodniowe, prowadząc badania na skalę techniczną w dziedzinie nowoczesnego kierunku zużytkowania węgla z dużym ograniczeniem robót podziemnych.

Profesor Kubiczek organizował i tworzył podstawy mechanizacji pracochłonnych robót, a przede wszystkim ładowania mechanicznego w górnictwie. Pracom swym nadał podstawowy kierunek rozwoju mechanizacji robót w kopalniach, co zostało ocenione jako praca o szczególnym znaczeniu dla rozwoju gospodarki narodowej.
Jako dyrektor działu górniczego Centralnego Zarządu PW w Katowicach (1948/49), zorganizował Wydział Usprawnień Technicznych, a następnie jako wicedyrektor i dyrektor departamentu techniki górniczej w Ministerstwie Górnictwa w Katowicach (1950–1955) opracował organizację Departamentu Techniki. W latach (1955–1962) dał się poznać jako bardzo prężny i wymagający dyrektor Wydawnictw Górniczo-Hutniczych w Katowicach.
Niezależnie od pracy na Śląsku w 1953 roku dostaje nominację zastępcy profesora i rozpoczyna wykłady z zakresu mechanizacji górnictwa w Katedrze Maszyn i Urządzeń Górniczych na nowo utworzonym w 1962 roku Wydziale Mechanizacji Górnictwa i Hutnictwa AGH w Krakowie.
W 1954 roku otrzymuje stanowisko docenta etatowego. Przez dwa lata (1960–1962) pracował także na stanowisku Kierownika Katedry Historii Techniki i Nauk Technicznych AGH, a po śmierci prof. W. Lesieckiego w 1962 roku został mianowany kierownikiem Katedry Maszyn i Urządzeń Górniczych i kierownikiem Zakładu Maszyn do Urabiania i Ładowania w tejże Katedrze. W 1964 roku na Wydziale Maszyn Górniczych i Hutniczych obronił pracę doktorską pt.: „Określenie oporów urabiania rudy siarki ze złóż tarnobrzeskich jako podstawy mechanizacji urabiania”. Promotorem pracy doktorskiej był profesor Bolesław Krupiński. Po uzyskaniu stopnia doktora nauk technicznych 1965 roku, w tym samym roku uzyskał też tytuł i stanowisko profesora nadzwyczajnego. W 1969 roku, po reorganizacji katedr w Akademii Górniczo-Hutniczej, został powołany na stanowisko Dyrektora Instytutu Maszyn Górniczych, Przeróbczych i Automatyki oraz Kierownika Zakładu Podziemnych Maszyn Górniczych. W 1972 roku otrzymał nominację na profesora zwyczajnego.
Dorobek publikacyjny prof. Tadeusza Kubiczka obejmuje ponad 100 pozycji. Najważniejsze to podręczniki: „Transport kopalniany” wydany sześciokrotnie, „Maszyny górnicze”, „Maszyny i urządzenia mechaniczne” oraz „Transport kopalniany – Przewóz”. Był promotorem kilkudziesięciu prac magisterskich oraz promotorem ośmiu prac doktorskich w tym autora niniejszego opracowania. Był także członkiem Komitetu Górnictwa PAN.
Za swoje osiągnięcia naukowe, dydaktyczne i organizacyjne został między innymi odznaczony wysokimi odznaczeniami państwowymi: złotym Krzyżem Zasługi, Krzyżami – Kawalerskim, Oficerskim i Komandorskim Orderu Odrodzenia Polski oraz wieloma medalami.
Warto w tym miejscu zanotować, że prof. Kubiczek był nadzwyczaj aktywnym członkiem Sekcji Turystyki Motorowej PTTK w Katowicach i brał udział we wszystkich zlotach krajoznawczych, które odbywał samochodem „Warszawa”. Jako członek sekcji turystyki motorowej zaopatrzony w specjalną książeczkę wpisywał do niej swoje uczestnictwo w motorowych zlotach krajoznawczych przeważnie dwudniowych i uwierzytelniał specjalnymi pieczątkami, zbierając za nie punkty, bowiem za odpowiednią ilość otrzymywało się odznaki: brązową, srebrną i złotą. Profesor Kubiczek był posiadaczem złotej odznaki PTTK.
Profesor Tadeusz Kubiczek ukończywszy 70 lat, 1 października 1972 roku przeszedł na zasłużoną emeryturę. Zmarł w Krakowie 4 marca 1988 roku w wieku 86 lat.
O trzech stypendystach Fundacji Kościuszkowskiej
Gazeta Pittsburczanin the Polish Daily Pittsburgher, wydana w Pittsburghu w sobotę dnia 4 czerwca 1927 roku zamieściła obszerny artykuł o trzech stypendystach Fundacji Kościuszkowskiej, którzy fachową swą pracą zdobyli najwyższe uznanie władz uniwersyteckich, wymieniając nazwiska Kubiczek, Szwabowicz i Złowodzki.
Czytamy w oryginalnym zapisie.
Dotychczas Polacy w Ameryce nie garnęli się zbytnio do uniwersytetów, a jeżeli który ukończył szkołę wyższą, to już mu to za wielki poczytywano tryumf. Lecz powoli i tu nadeszła zmiana na lepsze, zrozumiano, że wykształcenie staje się podstawą dobrobytu, że wysuwa ono nas na wyższy szczebel społeczny i zapewnia lepszą nam przyszłość. Wiele rodzin polskich, choć ubogich, zaczęło w ten sposób układać swój budżet, by dzieciom otworzyć wrota do szerszej wiedzy i do naukowego zawodu, wielu zaś młodzieńców i dziewcząt polskich potrafiło własną pracą pokonać trudności finansowe i o własnych swych siłach zdobyć sobie stopnie naukowe i pole do wyższej już kariery.
Ten przełom jaki dokonał się pomiędzy wychodźtwem, manifestuje się obecnie wyraźnie w Pittsburghu, gdzie 14 Polaków zdobyło sobie odznaczenia uniwersyteckie i dyplomy na wykonywanie poszczególnych zawodów. A przede wszystkiem zdołali oni wzbudzić w inteligentnej warstwie tutejszego społeczeństwa, podziw dla ich zapału do pracy, dla ścisłości w opanowywaniu tych przedmiotów, jakie sobie w swem, powołaniu wybrali, oraz dla swego przykładnego pod każdym względem zachowania.
Nasi polscy studenci, którzy wychodzą ze wszechnicy pittsburskiej na szerszą arenę życia to zwiastuni lepszej dla nas przyszłości. Wypełniają oni te luki w szeregach inteligencji, jakie się na wychodźtwie tak odczuwać dawały wobec fałszywego rozumowania, że nauka młodzieży naszej jest niepotrzebną, jeżeli w fabryce i rzemiośle w tym kraju „dobre można zrobić życie”. Ich przykład, wierzymy, utoruje drogę niejednemu jeszcze wahającemu się młodzieńcowi, do pójścia ich śladem, i zmieni nieraz zacofane zapatrywanie domu, trzymającego się jeszcze zaściankowych poglądów, co do wartości nauki i wiedzy.
Z dumą podnosimy ten fakt, nie tylko z obowiązku dziennikarskiego, ale celem rozbudzenia w szeregach naszych wychodźczych tego godnego zapału do wznoszenia się do tych wyżyn, jakie kulturalne stanowisko narodu, z którego pochodzimy, nam wskazuje. Dość już, długo staliśmy tu na szarym końcu, chyląc się nieraz kornie, przed zdobyczami naszych szczęśliwszych pod wielu warunkami antagonistów. Brakowało nam inicjatywy, skupialiśmy się sami w sobie i trzymaliśmy się wyłącznie naszego otoczenia, ale nadszedł przecież czas, że po trafimy się przedrzeć przez te zapory, które powodowała zbytnia nasza skromność, nieufność we własne siły i obojętność na wyższe poglądy, jakie daje prawdziwa nauka i wiedza.
Gdy rok rocznie powiększać się będą szeregi tych, co pewne arkana wiedzy w gałęziach przez się obranych opanowali, gdy fachowe wykształcenie postawi nas na równi z całym tutejszym narodem, i gdy w każdej dziedzinie zawodowej i naukowej będziemy mieć ekspertów, pod względem zdolności w niczem nie ustępujących swym kolegom, to inni i my sami zmienimy sąd o nas i posuniemy się znacznie naprzód w skali ogólnego poważania.
Nie możemy tutaj pominąć jednego jeszcze ciekawego spostrzeżenia. Dotychczas Polacy w swych studjach – zwłaszcza w Ojczyźnie – więcej zwracali uwagi na przedmioty bardziej nieuchwytne, lubowali się w sztuce, literaturze; filozofji, a zaniedbywali zawody praktyczne.
Z 14 studentów polskich, którzy opuszczają wszechnicę tutejszą w tym roku, wszyscy, prawie bez wyjątku rozpoczną swe działanie w dziedzinie zawodów praktycznych i szerokie pole w przyszłości dających.
W szczególności ci studenci, którzy przybyli tutaj z Polski, zgłębiają te powołania, w których Polska potrzebuje jak najwięcej fachowców, dla podniesienia swego przemysłu. Przez nader pochlebne wyniki swych nauk, uznanie jakie zdobyli wśród profesorów, którzy nawet jednemu z tych studentów ofiarowali asystenturę na tutejszym uniwersytecie, zadali oni kłam starej postawionej tezie, że Polak tylko po obłokach bujać potrafi, a do realnej i wytwórczej pracy zabrać się nie umie.
Wykazują oni przed światem, że odrodzona Polska ma ludzi w każdym kierunku zdolnych, którzy w sposób nowoczesny na równi z innymi cywilizowanymi narodami uruchomić potrafią wielkie warsztaty pracy. Z faktu, że studenci polscy garną się do umiejętnego i tak ścisłego badania technicznych i przemysłowych problemów i to ze zdumiewającymi wprost wynikami, śmiało wnioskować można, że jesteśmy w przededniu nowej ery, w której wytwórczość narodu na innej zupełnie stanie wyżynie.
Nasi Stypendyści Fundacji Kościuszkowskiej
Panowie Kubiczek, Szwabowicz i Złowodzki przybyli przed rokiem do Stanów Zjednoczonych mając już ukończone uniwersytety w kraju i dyplomy inżynierskie. Celem ich było pogłębić swą wiedzę przez ściślejsze zapoznanie się z tutejszymi metodami. Przyjęci oni zostali na kurs po święcony wyłącznie dla takich, którzy już studia mają ukończone, a którzy pragną specjalizować się w pewnej przez siebie obranej gałęzi. Że wymogi stawiane takim studentom są cięższe, jest rzeczą chyba zupełnie jasną. Tutaj należy wziąć także pod uwagę trudności językowe, jakie stają na przeszkodzie.
A mimo to nasi stypendyści, z niebywałą łatwością je pokonują, a uniwersytet w uznaniu ich zdolności i pracy, daje im najwyższe odznaczenia i tytuły, jakie ma do rozporządzenia, a mianowicie stopień „Master of Science”. By ten uzyskać, kandydat musi napisać rozprawę naukową w pewnym przez siebie obranym temacie. Tę nader dokładnie skrutynizują profesorowie, badając jej wartość. Niejednokrotnie dzieje się, że kandydat musi odejść z kwitkiem, gdy jego praca nie zawiera rzeczy nowych, tylko na zwykłych opiera się szablonach.
Ale prace naszych rodaków przyjęte zostały przez wydział profesorów z wielkiem uznaniem, co z szczególnem zadowoleniem podnieść należy, i biorąc jeszcze na wzgląd, że obok nawału pracy, jaki dawał sam przedmiot, opanować trzeba było i język angielski.
Państwo polskie pełne ma prawo szczycić się nimi, że w tak godny sposób odpowiedzieli wielkiemu zaufaniu w nich pokładanemu.
Jak to czytelnicy poznają z załączonej poniżej biografji dzielnych tych młodych Rodaków, nasi stypendyści jeszcze pewien czas pozostaną w USA dla praktycznego zapoznania się z systemem przemysłowym w tym kraju, aby następnie z tak rozszerzonymi poglądami w swych zawodach, powrócić do Polski i na jej usługi oddać nabytą swą wiedzę i doświadczenie.
• Opracował Artur Bęben